
Nowe sztuczne mięśnie: lżejsze, bezpieczniejsze i solidniejsze roboty
Z badań na Politechnice w Zurychu technologia dla grup mięśni bardziej podobnych do ludzkich i wrażliwych na interakcje z otoczeniem
Naukowcy z ETH Zurich opracowali niedawno sztuczne mięśnie umożliwiające ruch robota, ale ich rozwiązanie oferuje kilka zalet w porównaniu z wcześniej widzianymi technologiami.
Warte dalszych badań, można je stosować we wszystkich przypadkach, gdy roboty muszą być raczej miękkie niż sztywne lub muszą być bardziej wrażliwe w interakcji z otoczeniem.
Wielu robotyków marzy o budowaniu robotów, które nie będą jedynie połączeniem metalu lub innych twardych materiałów i silników, ale także będą bardziej miękkie i elastyczne.
„Miękkie” automaty mogą oddziaływać z otoczeniem w zupełnie inny sposób; na przykład mogą amortyzować wstrząsy jak ludzkie kończyny lub delikatnie chwytać przedmiot.
Przyniosłoby to również korzyści w zakresie zużycia energii: obecnie ruch robotów zwykle wymaga dużo energii, aby utrzymać pozycję przez długi czas, podczas gdy miękkie systemy mogłyby ją lepiej przechowywać.
Cóż więc może być bardziej oczywistego niż wzięcie ludzkiego mięśnia za model i próba jego odtworzenia?
Do widzenia, NCCR Robotics: pełne dwanaście lat w służbie Szwajcarii
Istnieje dron, który „wspina się” na drzewa, aby je chronić

Każdy naturalny mięsień również kurczy się w odpowiedzi na wystarczający impuls elektryczny
Funkcjonowanie sztucznych mięśni z konieczności opiera się na biologii.
Podobnie jak ich naturalne odpowiedniki, sztuczne mięśnie kurczą się w odpowiedzi na impuls elektryczny.
Jednak sztuczne mięśnie nie składają się z komórek i włókien, ale z worka wypełnionego płynem (najczęściej olejem), którego osłona jest częściowo pokryta elektrodami.
Kiedy elektrody te otrzymują napięcie elektryczne, łączą się i wpychają płyn do pozostałej części worka, który ugina się i dzięki temu jest w stanie unieść ciężar.
Pojedynczy worek jest analogiczny do krótkiej wiązki włókien mięśniowych.
Kilka takich worków można ze sobą połączyć, tworząc kompletny element napędowy, zwany także siłownikiem lub, prościej, sztucznym mięśniem.
Nagroda dla ProteusDrone, miękkiego robota o zmutowanych kształtach
Pies-robot: szwajcarski wynalazek inspirowany biologią zwierząt
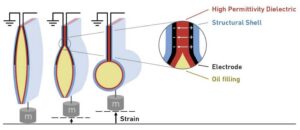
(Ilustracja: Gravert i in./Science/ETH Zurich)
Pierwotnie siłowniki elektrostatyczne wymagały napięcia od 6.000 do 10.000 XNUMX woltów
Pomysł opracowania sztucznych mięśni nie jest nowy, ale do tej pory istniała poważna przeszkoda w ich realizacji: siłowniki elektrostatyczne działały tylko przy ekstremalnie wysokich napięciach, od około 6.000 10.000 do XNUMX XNUMX woltów.
Wymóg ten miał kilka konsekwencji: np. mięśnie musiały być podłączone do dużych, ciężkich wzmacniaczy napięciowych, nie działały w wodzie i nie były do końca bezpieczne dla człowieka.
Obecnie opracowano nowe rozwiązanie Roberta Katzschmanna, profesor robotyki w ETH Zurich, wraz ze Stephanem-Danielem Gravertem, Elią Varini i innymi współpracownikami.
Opublikowali artykuł na temat swojej wersji sztucznego mięśnia, który faktycznie ma kilka zalet, w artykule na portalu informacyjnym „Science Advances”.
Stephan-Daniel Gravert, który pracuje jako asystent naukowy w laboratorium Roberta Katzschmanna, zaprojektował nowatorską skorupę torby.
Nowy brytyjsko-szwajcarski dron strażacki do pomocy strażakom
W ten sposób w Szwajcarii roboty „uczą się” tajników trekkingu

(Fot.: Gravert i inni, Science, 2024)
Rozwiązanie na przyszłość? Dziś pochodzi z materiału ferroelektrycznego o wysokiej przepuszczalności
Naukowcy nazwali nowe sztuczne mięśnie siłownikami HALVE, gdzie HALVE oznacza „hydraulicznie wzmacniany elektrostatyk niskiego napięcia”.
„W innych siłownikach elektrody znajdują się na zewnątrz obudowy. U nas skorupa składa się z kilku warstw. Wzięliśmy materiał ferroelektryczny o dużej przepuszczalności, czyli zdolny do magazynowania stosunkowo dużych ilości energii elektrycznej, i połączyliśmy go z warstwą elektrod. Następnie pokryliśmy wszystko powłoką polimerową, która ma doskonałe właściwości mechaniczne i sprawia, że torba jest bardziej stabilna.”on tłumaczy.
W ten sposób badaczom udało się zmniejszyć wymagane napięcie, ponieważ znacznie wyższa przenikalność elektryczna materiału ferroelektrycznego pozwala na uzyskanie dużych sił pomimo niskiego napięcia.
Stephan-Daniel Gravert i Elia Varini nie tylko wspólnie opracowali obudowę siłowników HALVE, ale także sami zbudowali siłowniki w laboratorium do zastosowania w dwóch konkretnych robotach.
W Tel Awiwie laboratorium Enel zajmujące się wykorzystaniem sztucznej inteligencji i robotyki w energetyce
W ten sposób robot Atlas może już z nami pracować i wchodzić w interakcje
(Zdjęcie: zrzut ekranu wideo autorstwa Graverta i in., Science, 2024)
Techniczne „szczypce” i „ryba” pokazują, co potrafi mięsień zaprojektowany w Szwajcarii
Jednym z takich przykładów robota jest chwytak o wysokości 11 centymetrów i dwóch palcach.
Każdy palec poruszany jest przez trzy połączone szeregowo kieszenie siłownika HALVE.
Mały zasilacz akumulatorowy zasila robota napięciem 900 woltów.
Razem bateria i zasilacz ważą zaledwie 15 gramów.
Cały zacisk łącznie z elektroniką zasilania i sterowania waży 45.
Chwytak może chwycić gładki plastikowy przedmiot z siłą wystarczającą do utrzymania jego własnego ciężaru, gdy przedmiot zostanie uniesiony w powietrze za pomocą liny.
„Ten przykład doskonale pokazuje, jak małe, lekkie i wydajne są siłowniki HALVE. Oznacza to również, że zrobiliśmy ogromny krok w kierunku naszego celu, jakim jest stworzenie zintegrowanych systemów napędzanych mięśniami., mówi z satysfakcją Katzschmann.
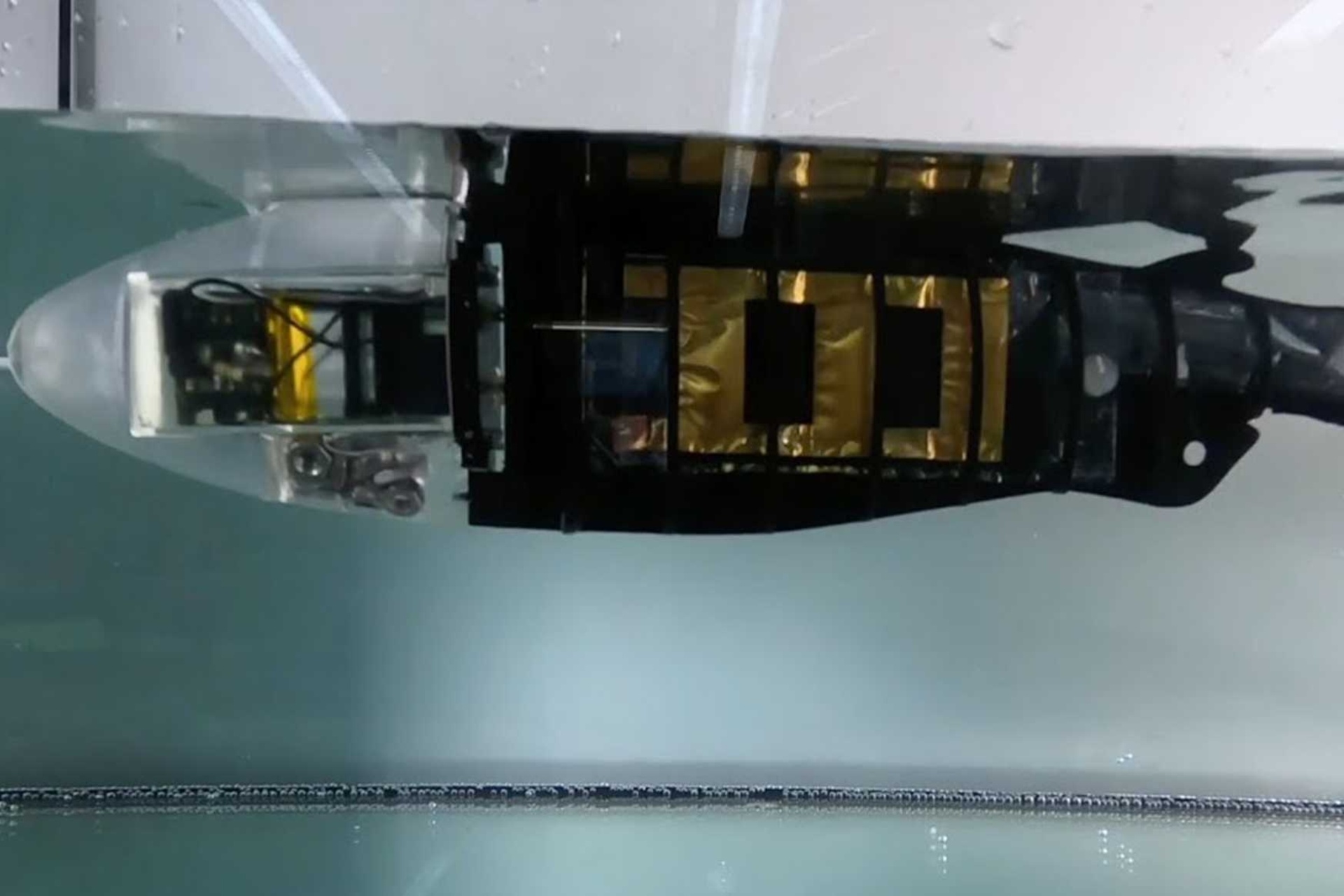
Drugi obiekt to pływak przypominający rybę, mający prawie 30 centymetrów długości i potrafiący z łatwością poruszać się w wodzie.
Składa się z „głowicy” zawierającej elektronikę i elastycznego „korpusu”, do którego przymocowane są siłowniki „elektrostatyczne niskonapięciowe ze wzmocnieniem hydraulicznym”.
Siłowniki te poruszają się naprzemiennie w rytmie typowym dla pływania.
Autonomiczna ryba może wyjść ze stanu zastoju z prędkością trzech centymetrów na sekundę w 14 sekund, a wszystko to zanurzając się w zwykłej wodzie z kranu.
Pies-robot: szwajcarski wynalazek inspirowany biologią zwierząt
W Szwajcarii Politechnika Federalna za przejrzystą i niezawodną sztuczną inteligencję

Nowe siłowniki są znacznie wytrzymalsze niż inne sztuczne mięśnie, a także wodoodporne
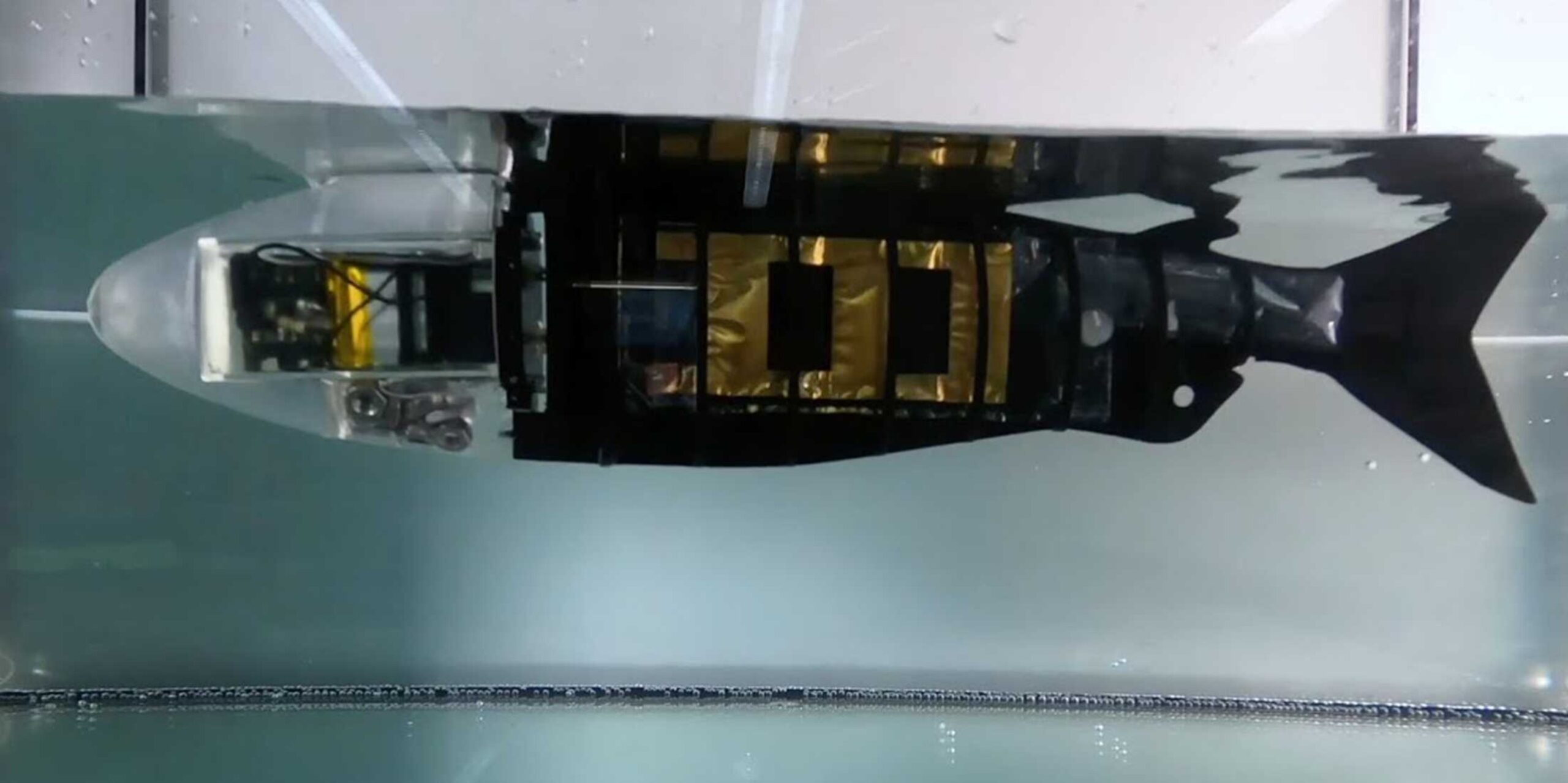
Ten drugi przykład jest ważny, ponieważ demonstruje kolejną nową funkcję siłowników HALVE.
Ponieważ elektrody nie są już chronione na zewnątrz skorupy, sztuczne mięśnie są teraz wodoodporne i można ich używać nawet po zanurzeniu w cieczach przewodzących.
„Ryba ilustruje ogólną zaletę tych siłowników: elektrody są chronione przed środowiskiem zewnętrznym i odwrotnie, środowisko jest chronione przez elektrody. Można więc na przykład używać tych siłowników elektrostatycznych w wodzie lub dotykać ich.”– dodaje profesor z Federalnego Instytutu Technologii w Zurychu.
Warstwowa struktura kopert ma jeszcze jedną zaletę: nowe siłowniki są znacznie wytrzymalsze niż inne sztuczne mięśnie.
W idealnym przypadku koperty powinny umożliwiać duży ruch i to szybko.
Jednak nawet najmniejszy błąd produkcyjny, taki jak drobinka kurzu pomiędzy elektrodami, może doprowadzić do awarii elektrycznej, czegoś w rodzaju „mini uderzenia pioruna”.
4 listopada w Lozannie „Swiss Robotics Day”
Dzięki DroneHub bezprecedensowa… „woliera” do badań nad dronami

Problemy z „mini błyskawicami” rozwiązane, firmy gotowe do produkcji na dużą skalę
„Kiedy zdarzyło się to w poprzednich modelach, elektroda przepaliła się, tworząc dziurę w skorupie. Umożliwiło to ucieczkę cieczy i sprawiło, że siłownik stał się bezużyteczny”, wyjaśnia Stephan-Daniel Gravert.
Problem ten został rozwiązany w siłownikach HALVE, ponieważ pojedynczy otwór zasadniczo zamyka się sam dzięki ochronnej zewnętrznej warstwie tworzywa sztucznego.
Dzięki temu obudowa pozostaje w pełni funkcjonalna nawet po awarii elektrycznej.
Obaj badacze są wyraźnie szczęśliwi, że dokonali zdecydowanego przełomu w rozwoju sztucznych mięśni, ale są też realistami.
Jak mówi Robert Katzschmann: „Teraz musimy przygotować tę technologię do produkcji na dużą skalę, a nie możemy tego zrobić tutaj, w laboratorium ETH. Nie zdradzając zbyt wielu rewelacji, mogę powiedzieć, że już obserwujemy zainteresowanie firm, które chciałyby z nami współpracować.”
Na przykład sztuczne mięśnie będą mogły pewnego dnia zostać wykorzystane w nowych robotach, protetykach lub urządzeniach do noszenia.
Innymi słowy, w technologiach stosowanych w ciele ludzkim i na nim…
Malina zrobiona z... silikonu, która ma instruować roboty do zbierania plonów
Właściwy hołd od Lugano dla młodego zespołu robotów Smilebots



Nieograniczony chwytak, napędzany siłownikami HALVE, chwytający blok PLA
Nieuwiązana sztuczna ryba, napędzana siłownikami HALVE, w wodzie wodociągowej
Możesz być zainteresowanym także tym:

W Brazylii pierwsze na świecie spotkanie bezpieczeństwa biologicznego i synchrotronów
W Campinas laboratorium ochrony biologicznej o maksymalnym poziomie NB4 zostanie podłączone do źródeł światła akceleratora cząstek

Dziś w Górnej Adydze EDIH NOI jest nowym punktem odniesienia dla sztucznej inteligencji
W Bolzano 4,6 mln euro z funduszu PNRR zostanie przeznaczone na usługi dla lokalnych firm z zakresu cyfryzacji wywiadu…
Austria, Niemcy i Szwajcaria na rzecz „bardziej innowacyjnych” kolei towarowych
Ministrowie DACH Leonore Gewessler, Volker Wissing i Albert Rösti: wprowadzenie cyfrowego automatycznego parowania jest kluczowym elementem

Perswazja czy manipulacja? Geneza i historyczne skutki PR
W ten sposób Public Relations, od sofistycznego dialogu starożytnej Grecji po obecną erę cyfrową, nadal oferuje ciągłe innowacje
przez Francescę CaonDyrektor generalny CAON Public Relations

 //
//